Team Name
WR140 Rocket
Timeline
Summer 2022 – Fall 2022
Students
- DEMORIA SHERMAN
- MILAD NOORI
- SERGIO GUERRERO
- MURPHY BALSOMI
Sponsor
Abstract
The TVC Rocket is designed and developed to be a model for an efficient self-landing model rocket. This design provides a controlled ascent towards apogee. It is stabilized through Gimbal Mount and Thrust Vector Control system.
Background
The Project was a great learning experience for the team to follow Agile Methodology and successfully created the product. The product can be used as an educational tool for avionics, embedded systems, and real time processing. The product could be scaled up along other available technologies (computer vision and GPS) to perform a more complex task such as targeting control, and self-landing.
Project Requirements
- Stay stable throughout the flight while ascending using thrust vector control and gimbal mounts.
- Return to the ground safely for reusability
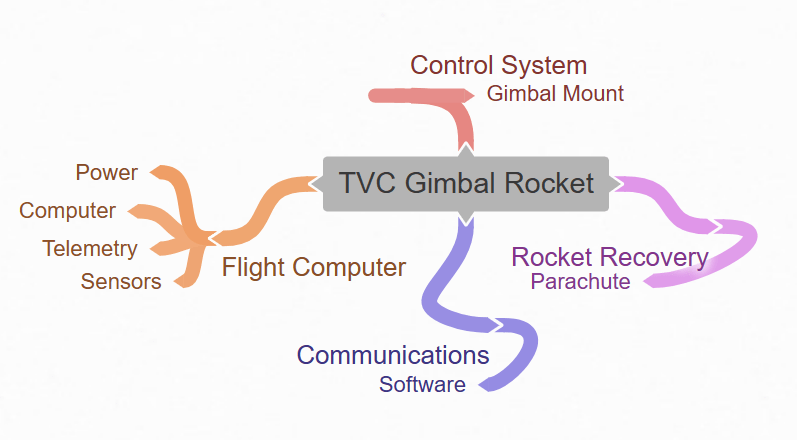
System Overview
This rocket is developed with Four layers in mind as shown in the diagram below. The focus of the team was to learn more by making the key components for each layer of system architecture and avoid purchasing prebuilt subsystems as much as possible. Therefore, we used fewer prebuilt parts for the development of the rocket. We built the flight computer, the gimbal mount, and the parachute subsystem to achieve the requirements mentioned above. Thus, we spend more time on Layers 1 – 3 and we were using Arduino IDE for data stats. We are saving flight data on the memory card mounted in the flight computer microcontroller to be analyzed for better performances of the launches in the future. Also, the development of a program similar to Mission Planner by ArduPilot can provide the user with better insight into the rocket’s performance.
Results
The design overall has matched the product’s expectation for thrust vector controlling a model rocket. Table below shows the project milestones our team achieved.
| Sprint | Milestones |
| 1 | Project Requirement Analysis |
| 2 | Flight Computer Prototype |
| 3 | Rocket Stand Design & Construction |
| 4 | Architectural Design Specification (ADS) |
| 5 | Rocket Assembly, Gimbal Mount Fan Test |
| 6 | Gimbal Mount Static Test with real engine |
| 7 | Rocket Recovery Subsystem Ejection charge Test |
| 8 | Painting and finishing touches on Rocket Design |

Highlight Insight: Testing and integration over time.
Lessons learned:
- Basic avionics control for model rockets.
- Embedded avionics construction.
- Embedded software state space machines.
- Model Rocketry experience.
- Basic electronics prototyping and PCB construction.
Future Work
- Building ground system software similar to Mission Planner software by ArduPilot for monitoring the flight better and get better insights about the performance of the rocket.
- Automate the launch pad for launching the rocket with ground system software.
- Update the rocket with more durable components.
- Equip the rocket with throttled engine for controlled descent and better self-landing
Project Files
Project Charter (link)
System Requirements Specification (link)
Architectural Design Specification (link)
Detailed Design Specification (link)
Poster (link)
Project Source Code (link)
Project Source Code Documentation (link)
References
[1] PJRC, Teensy 4.1 Development Board, [Online]. Available: https://www.pjrc.com/store/teensy41.html.
[Accessed: 30-Jul-2022].
[2] Dhitt, “Designing a rocket in six easy steps,â NASA, 09-Jul-2015.[Online]. Available:
https://blogs.nasa.gov/Rocketology/2015/07/09/designing-a-rocket-in-six-easy-steps/ [Accessed:
31-Jul-2022].
[3] Sherman Demoria. Preliminary detailed rocket bill of materials, Excel Spreed Sheet, June 2022.
[4] Bannard Joe. Flight Computer – Build Signal R2. https://www.youtube.com/watch?v=
6LxunECV5IQ&list=PLyV774-3p835n5XZFz4JMvF-Griy_uOdV&index=3, 2018.
[5] Bannard Joe. Schematic Design – Landing Model Rockets Ep. 4. https://www.youtube.com/
watch?v=23gJY8a8rHw&list=PLyV774-3p8348Fl5V6ciIBh0ZA446q93I&index=5, 2019.
[6] McWhorter Paul. 9-Axis IMU LESSON 26: Understanding PID Control systems with Arduino. https://www.youtube.com/watch?v=t7ImNDOQIzM&list=
PLGs0VKk2DiYwEo-k0mjIkWXlkrJWAU4L9&index=26, 2018.
[7] McWhorter Paul. Easy Arduino Data Logging and Telemetry. https://www.youtube.com/ watch?v=lFZ26gD7OIE&list=LL&index=23&t=1383s, 2018.
[8] S. Madgwick, “An efficient orientation filter for inertial and inertial/magnetic sensor arrays,” CSE466: Software for embedded systems, 30-Apr-2010. [Online]. Available: https://courses.cs.washington.edu/courses/cse466/. [Accessed: 01-Dec-2022].
[9] “Dust rings in the wolf-rayet 140 system,” NASA. [Online]. Available: https://www.jpl.nasa.gov/images/pia25432-dust-rings-in-the-wolf-rayet-140-system. [Accessed: 01-Dec-2022].